Diffusion LLM Part 2: Discrete Diffusion -- How to Add Noise to Text
D3PM, Transition Matrices, Absorbing States, MDLM -- how to bring diffusion from continuous space to discrete tokens.

Diffusion LLM Part 2: Discrete Diffusion -- How Do You Add Noise to Text?
In Part 1, we explored the principles of Diffusion operating in continuous space. Adding Gaussian noise to image pixels is natural, but text tokens are discrete data. What happens if you add noise of 0.3 to "hello"?
In this post, we cover how to bring Diffusion into discrete space. Starting from D3PM's Transition Matrix and arriving at MDLM's Masked Diffusion -- the direct ancestors of LLaDA.
D3PM: Diffusion in Discrete Space
Austin et al. (2021) raise a fundamental question in D3PM (Discrete Denoising Diffusion Probabilistic Models): how do you define a forward process for discrete data where you can't add Gaussian noise?
The answer: use a Transition Matrix.
In continuous Diffusion, Gaussian noise plays a central role. In discrete Diffusion, a transition matrix Q_t takes its place. At each step t, the probability of token x_{t-1} changing to x_t is defined by a matrix:
q(x_t | x_{t-1}) = Cat(x_t; p = x_{t-1} * Q_t)
Here, Cat is the Categorical distribution, and Q_t is a K x K matrix (where K is the vocabulary size). Q_t[i][j] represents the probability of token i changing to token j.
Correspondence with continuous Diffusion:
Related Posts
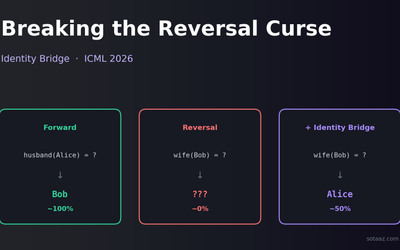
Breaking the Reversal Curse with Identity Bridges — the ICML 2026 fix that shouldn't work but does
LLMs trained on "Alice's husband is Bob" famously fail on "Bob's wife is?" — the reversal curse. A new ICML 2026 paper fixes it by adding one weird kind of self-referential example to the training set. The naive version doesn't work; the right version does.

Self-Evolving AI Agents — The New Paradigm of 2026
GenericAgent, Evolver, Open Agents — comparing 3 self-evolving agent frameworks that learn, adapt, and grow without human coding.

Build Your Own LLM Knowledge Base — A Karpathy-Style Knowledge System
Complete guide to building a permanent personal knowledge system with Obsidian + Claude Code. Wiki + Memory dual-axis architecture.